Geometric informatics plays a key role in the world of robotics. It involves the use of geometric principles and mathematical algorithms to solve problems related to shape, space, and movement. In robotics, geometric informatics helps robots understand their environment, move with precision, and perform complex tasks. In this blog post, we will explore the top applications of geometric informatics in robotics and how these principles make robots smarter, more efficient, and capable of achieving once-impossible tasks.
1. Robot Movement and Path Planning
One of the most important applications of geometric informatics in robotics is path planning. For robots to move from one point to another, they need to understand the space around them and navigate through it without colliding with obstacles. Geometric algorithms are used to map out the robot’s environment and plan the most efficient path. These algorithms take into account factors like distance, angles, and obstacles, helping robots move smoothly from one point to another. Path planning is essential for robots used in manufacturing, delivery, and even self-driving cars.
2. 3D Mapping and Localization
Another significant application of geometric informatics in robotics is 3D mapping and localization. In order for a robot to navigate its environment effectively, it needs to know where it is and what the surroundings look like. Using geometric informatics, robots can create 3D maps of their environment by analyzing data from sensors such as cameras and LiDAR. This helps robots understand their position within the space and identify objects around them. Accurate mapping and localization are crucial for robots in autonomous vehicles, warehouse robots, and robots used in exploration or rescue missions.
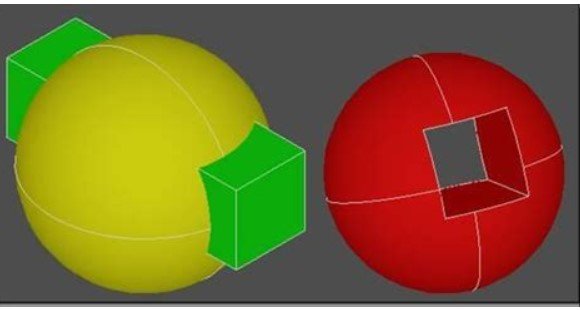
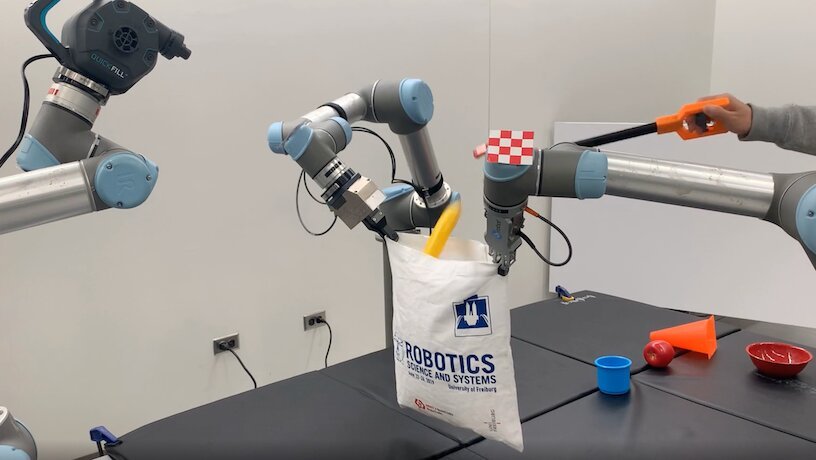
3. Object Recognition and Manipulation
Geometric informatics also plays an important role in object recognition and manipulation. Robots, especially those in manufacturing or service industries, need to identify and handle objects with precision. Geometric algorithms help robots recognize the shape, size, and position of objects. By using 3D modeling and geometric analysis, robots can “see” objects in their environment and determine how to pick them up, move them, or interact with them. This application is especially important in tasks like packaging, assembly, or sorting.
4. Robot Design and Structure
The design of a robot’s body and structure is another area where geometric informatics is applied. Geometric principles are used to create a robot’s frame, limbs, and joints. These principles help ensure that the robot is stable, efficient, and able to perform its tasks effectively. For example, when designing robotic arms, engineers use geometric algorithms to determine the best angles and distances for the joints, ensuring that the arm can reach a wide range of positions. This use of geometry makes the design process more efficient and helps create robots that can perform complex tasks with accuracy.
5. Motion Simulation and Control
In robotics, precise motion is critical for success. Geometric informatics helps simulate and control the movements of robots. By using geometric modeling, engineers can predict how robots will move in different environments. They can then adjust the robot’s movements to avoid obstacles or improve efficiency. Motion control is particularly important for robots that perform delicate tasks, such as assembling small parts or performing surgeries. The combination of geometry and algorithms allows robots to move with the exact precision needed for these tasks.
6. Collaborative Robotics and Human-Robot Interaction
Another key application of geometric informatics in robotics is in human-robot interaction. As robots are increasingly used alongside humans in industries like manufacturing and healthcare, they need to understand human movements and interact safely. Geometric informatics helps robots recognize human gestures, predict human movements, and navigate around people without causing harm. These applications are used in collaborative robots, or cobots, which work alongside humans to assist in various tasks. Geometric algorithms ensure that the robot’s movements are coordinated with human workers, making the workplace safer and more efficient.
7. Swarm Robotics
Swarm robotics is a growing field where multiple robots work together to achieve a common goal. Geometric informatics plays a crucial role in ensuring that these robots can coordinate their movements and share information. Through geometric algorithms, swarm robots can understand their relative positions to one another, avoid collisions, and work together to complete tasks more quickly and efficiently. This application is useful in a variety of fields, such as agriculture, environmental monitoring, and search-and-rescue operations.
Conclusion
In conclusion, the top applications of geometric informatics in robotics are revolutionizing the way robots interact with their environment, perform tasks, and collaborate with humans. From path planning and 3D mapping to object recognition and swarm robotics, geometric informatics provides the foundation for creating smarter and more efficient robots. As technology continues to evolve, the role of geometry in robotics will only increase, leading to even more advanced robots capable of performing complex tasks with precision and accuracy. The future of robotics is shaped by the power of geometric informatics, and its applications are only just beginning to unfold.